

Flying close to a building or over the open ocean are very different conditions for a drone, particularly when it’s windy.
These expensive machines (often with expensive cameras) are used to map difficult terrain, in military exercises, to monitor wildlife, and more, but since they can’t adapt to different flying conditions they’re often grounded when it becomes too windy.
Pakorn Poksawat, a PhD candidate at RMIT University, has created a self-tuning algorithm to help keep drones airborne.
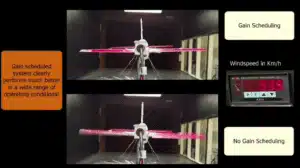
Trials of fixed-wing drones using his algorithm in a wind tunnel have shown a 30 percent improvement in stability over the conventional autopilot.
“The common practices in designing flight controllers mainly involve extensive simulations, wind tunnel testing, and trial-and-error tuning by experienced pilots,” Pakorn says.
“This can be costly and time-consuming. It can also potentially be dangerous if the flight test engineers are not experienced drone operators.”
The drone records and studies its own behaviour in real-time. Based on this data, it then decides what to do using the mathematical algorithm to continually define and adjust the flight control system. It keeps learning until it reaches its optimal flight stability, or a predefined performance level.
Pakorn is currently developing another model to predict turbulence in advance, so the drone can adjust its behaviour even more effectively.


Drone operators don’t fly when it’s too windy—Pakorn wants to change that. Credit: Pakorn Poksawat



 Fresh Science is on hold for 2022. We will be back in 2023.
Fresh Science is on hold for 2022. We will be back in 2023.